Далее просверлил отверстия и начал паять детали. Самой большой
проблемой были стабилитроны. Стабилитроны стал искать на плате от
ЭЛТ-монитора. Подписаны на плате они как ZD (Zener Diode). Естественно
маркировка у них непонятная и неизвестно где и как искать. Чтобы
определить, на сколько вольт стабилитрон можно собрать простую схемку.

Вольтметр достаточно точно покажет, на сколько вольт стабилитрон.
Таким нехитрым способом нашел приблизительные по номиналу стабилитроны.
Вместо 5,6В установил 6,2В, вместо 12,6В поставил 2 стабилитрона
последовательно 6,2+6,2=12,4В
.

Транзистор можно поставить КТ315 . У себя поставил С945 . Диоды тоже любые, я выпаял все 3 шт. из диодного моста той-же платы от монитора. Номинал конденсаторов также не критичен, но их поставил по номиналу.
Немного про красные пятачкИ у панелек. Эти ноги вообще не паяются у панелек. Полностью готовый девайс выглядит так:

Панельки решил не все паять, т.к. мне нужно было прошить только PIC16F628А . После того как спаял нужно настроить программу. Прошивать мы будем IC-Prog. Скачиваем программу , распаковываем из архива, все файлы должны быть обязательно в одной папке!
1)
Если вы пользуетесь Windows NT, 2000 или XP, то правой кнопкой щёлкните на файле icprog.exe. "Свойства
" >> вкладка "Совместимость
" >> Установите "галочку" на "Запустить программу в режиме совместимости с:
" >>
выберите "Windows 2000".
2) Запускаем программу. Если она уже на русском - ничего не нужно, переходите к шагу 3 .
Если программа на английском, то жмите "Settings
" >> "Options
" >> вкладку "Language
" >> установите язык "Russian
" и нажмите "Ok".
Согласитесь с утверждением "You need to restart IC-Prog now
" (нажмите "Ok
"). Оболочка программатора перезапустится.
3)
Теперь нужно настроить программатор. Кликайте "Настройки
" >> "Программатор
". Проверьте установки, выберите используемый вами COM-порт, нажмите "Ok
".

Для очень "быстрых" компьютеров возможно потребуется увеличить параметр "Задержка Ввода/Вывода". Увеличение этого параметра увеличивает надёжность программирования, однако, увеличивается и время, затрачиваемое на программирование микросхемы.
4) Только для пользователей Windows NT, 2000 или XP. Нажмите "Настройки " >> "Опции " >> выберите вкладку "Общие " >> установите "галочку" на пункте "Вкл. NT/2000/XP драйвер " >> Нажмите "Ok " >> если драйвер до этого не был устновлен на вашей системе, в появившемся окне "Confirm " нажмите "Ok" . Драйвер установится, и оболочка программатора перезапустится.
5) Нажмите снова "Настройки " >> "Опции " >> выберите вкладку "I2C " >> установите "галочки" на пунктах: "Включить MCLR как VCC " и "Включить запись блоками ". Нажмите "Ok ".
6)
"Настройки
" >> "Опции
" >> выберите вкладку "Программирование
" >> снимите "галочку" с пункта: "Проверка после программирования
" и установите "галочку" на пункте "Проверка при программировании
". Нажмите "Ok
".

Готово, теперь программа полностью готова к работе с программатором. Подключаем наш программатор к СОМ порту, выбираем наш микроконтроллер в программе, открываем прошивку и программируем любые МК серии PIC. Удачи всем в работе с программатором и контроллерами!
МК этот широко распространенный и в розничной продаже встречается часто. Если Вы в г.Москве, то Вам дорога в "Чип и Дип" - там его можно приобрести примерно за 350 руб. Настоятельно рекомендую покупать его в DIP корпусе (широком), благо такой есть. Для начальных опытов и проверок это самый лучший вариант. Если Вы вдруг приобретете его в корпусе PLCC, то будет целая куча проблем с его использованием - шаг плоских выводов в 1.27 мм не самый удобный вариант.

Итак, с МК определились. В файлах к этой статье можно найти полный справочник по этому МК. Что покупать теперь понятно, но пока дайвайте все же напишем программу, что бы было понятно что с ней дальше делать и как ее "зашить" в этот МК.
Запускаем программу MPLAB (которую установили в прошлых статьях). Выбираем пункт меню Project -> Project Wizard . В открывшемся окне нажимаем Далее .

В выпавшем списке доступных МК выбираем PIC16F877. Нажимаем Далее .

Здесь надо выбрать компилятор, который будет обрабатывать код нашей программы. Обязательно надо выбрать пункт HI-TECH PICC Toolsuite в выпадающем списке Active Toolsuite . Это тот самый компилятор языка Си, который мы установили в прошлой стаье. Нажимаем Далее .

Задайте имя проекта, например, TestPIC и укажите директорию проекта. Тут есть две хитрости. Первое, MPLAB не создают сам отдельную папку для проекта и разместит все файлы прямо в той директории которую Вы указали. Второе и пожалуй, самое главное - MPLAB не понимает русских букв в названии пути. Проект то он создаст, но во время работы программы, особенно при сохранении и открытии файлов, возникнут такие "глюки" что долго будете голову ломать в чем дело. Поэтому, в пути к папке проекта не должны попадаться русские названия. Нажимаем Далее .

Здесь можно добавить к проекту какие-либо готовые файлы, но нам пока такая возможность не нужна. Жмем Далее .

Тут я думаю все понятно. Нажимаем Готово .

Заготовку проекта сделали, но он пока пустой. Нажимаем File -> New . Появится новое окно с заголовком Untitled . Далее выбираем File -> Save As... . Укажите имя файла, например, TestPIC.c и перейдите в папку проекта. Обязательно поставьте галочку Add File to Project .

Теперь помещаем ниже следующий код в открытое окно файла проекта TestPIC.c (весь проект целиком можно найти в файлах к этой статье).
#include
Наверное Вам интересно, что будет результатом работы этого кода. Будет происходить следующее: к МК подключаются 8 светодиодов. При включении питания, светодиоды начнут мигать в виде "волны" (это лучше видеть, благо осталось нет так уж и много). Рассмотрим поподробнее сам код.
Вначале идет думаю всем знакомый оператор include, который подключает заголовочный файл со всеми неоходимыми макроопределениями. Далее идет еще одна директива препроцессора __CONFIG, в которую предается 16-ти ричное число, характерезующие набор специальных опций и свойств, характерезующих работу МК. Мы еще в ходе этой статьи вернемся к этому моменту. Переходим сразу к началу функции main() - точки входа в собственно сам исполняемый код программы. Далее следует операция с каким-то T0IE. Конктерно эта строчка означает, что необходимо запретить прерывания от таймера при работе МК. TOIE - это определенный с помощью #define в файле pic.h адрес специального регистра, отвечающего за эту операцию (и вообще, если видете в коде странные до этого в коде не определенные переменные записанные в верхнем регистре, то это наверняка символические имена регистров МК). Строчка GIE=0; - запрещает обработку любых прерываний глобально во всем МК. Прерывания для нашего простого примера мы использовать не будем, т.к. они нам просто не нужны.
TRISB=0; - означает, что порт ввода/вывода B МК PIC16F877 будет работать на выход, т.е. к нему можно теперь подключать нагрузку, на которой можно подвать из МК 0 или +5В (этой нагрузкой будут светодиоды). В следующей строке мы помещаем в порт B число 0 - т.е. на всех выводах этого порта, настроенного на выход, будет нулевое напряжение. Далее идет конструкция из оператора while, причем с таким параметром, что некоторые программисты, привыкшие писать на Си для ПК будут слегка удивлены - так ведь это, мол, бесконечный цикл, программа зависнет. Но нам именно этого и надо. МК не может ни чего не делать, он должен постоянно что-то выпонять. Поэтому, для МК работа программы в бесконечном цикле это жизненная необходимость. Затем идет оператор увелечения на 1 числа находящегося в порту B. Немного поясним. Если написать PORTB=0xFF; - то на всех выводах порта будет 1. Если PORTB=0x0; - на всех 0. (я думаю, это должно быть понятно). Конструкция из оператора цикла for, как видно, не делает какой-либо "умной" работы не делает и нужна только для организации временной задержки. Если этот участок кода убрать, то мы просто не будем замечать как меняется напряжение на светодиодах (будет очень быстро).

Что они означают? Давайте по порядку.
Пора откомпилировать код. Запустите Project -> Build All . При этом начнется компиляция проекта и появится вот такое окно с чудной записью в конце BUILD SUCCEEDED.

Теперь, если Вы посмотрите в папку нашего проекта, то должны увидеть там файл TestPIC.hex - итог всех наших трудов. В нем содержится специальный код, сформированный из наших писаний на Си, для загрузки в память МК. Чтобы двигаться дальше нам нужен программатор, с помощью которого мы запишем в МК нашу программу. Пора перейти к следующей статье, где как раз и рассматривается вопрос изготовления собственного программатора.
© Иванов Дмитрий
Апрель 2007
Когда делаются схемы, необходимо, чтобы кто-то или что-то контролировало выполнение необходимых действий. Для человека это довольно проблематично, так как приходится использовать значительное количество различных элементов, позволяющих контролировать их работу (транзисторы, резисторы, тиристоры, диоды, конденсаторы и прочие). Но все сложные и большие схемы можно контролировать с помощью контроллеров (микроконтроллеров). Что они собой представляют, будет рассказано на примере семейств РІС. Итак, для чайников? Какая их схема и где они используются.
PIC-контроллер (или микроконтроллер) является средством автоматизации выполнения определённых действий с помощью заранее подготовленной программы. Особенностью представителей этой линейки продукции является легкость в программировании и доступность всех необходимых функций для работы. Обрисовывая его конструкцию, следует заметить, что в его составе присутствует только один кристалл кремния (это характерная особенность всех микроконтроллеров). Кроме него, PIC-контроллер имеет определённое количество ножек. Часть из них могут использоваться как логические входы, часть как выходы, остальные имеют двустороннее применение. Ножки могут быть или цифровыми, или аналоговыми.
Для работы подавляющего большинства РІС-контроллеров необходимо стабильное напряжение - 5В. Этого хватает, чтобы он мог работать в своём обычном режиме и выполнять поставленную перед ним программу. напрямую от компьютера невозможно. Для этой цели используется программатор.

PIC-контроллер не существует в единичном экземпляре. Компания производитель выпускает значительный ассортимент микроконтроллеров, каждый из которых имеет свои характеристики, возможности и потенциальные цели применения. Количество самих семейств довольно велико и зависит от классифицирующего признака, который берётся как основной. Поэтому стоит сообщить только об основной классификации, в которой есть всего три семейства: 8-, 16- и 32-битные. Они в свою очередь делятся на другие, но поскольку сами семейства не являются темой статьи, то о них и не будет вестись разговор.
Благодаря своей универсальности PIC-контроллер может быть применён практически где угодно. Сами микроконтроллеры можно встретить в холодильниках, телевизорах, стиральных машинках. Но линейка продукции РІС имеет ту особенность, что схемы на PIC-контроллерах популярны среди радиолюбителей и робототехников-самоучек. С их помощью можно легко настроить работу узла или всего приспособления. Способствует такой популярности разумная цена, легкость программирования и значительное количество учебного материала.
Применить PIC-контроллер можно при создании робота-руки и в других поделках, которые можно сделать, ограничиваясь скромным бюджетом. Можно использовать и для чего-то производственного - довольно популярной является тема создания автоматических самодельных станков, управляемых микроконтроллером. Спектр использования является широким, и при грамотном подходе могут быть выполнены практически любые цели, поэтому схемы на PIC-контроллерах можно увидеть не только на любительских творениях.

Минимальное необходимое программное обеспечение - это блокнот. Но всё же в силу свободного распространения можно воспользоваться и предлагаемым от компании-производителя программным средством MPLAB. Точнее, линейкой программных средств (среды разработки, компиляторы) MPLAB. Благодаря политике компании он распространяется бесплатно, но имеет определённые ограничения. Так, при краткосрочной демонстрационной версии можно попробовать со всеми возможностями, но после её окончания функционал программы будет урезан. В полноценной программе присутствует значительный инструментарий, который позволяет легко создавать программы, удобно искать различные проблемные участки и проводить оптимизацию кода. В зависимости от версии может быть прекращена функция оптимизации кода или уменьшено количество контроллеров, поддерживаемых программой. Ради правды стоит сказать, что компания оставляет поддержку исключительно самым популярным представителям.
Существует и ряд программного обеспечения, предоставляемого другими компаниями. В целом их функционал является похожим, но существуют и отличия. Так, многие высказывают недовольство, что MPLAB имеет нелояльный к пользователям дизайн. Поэтому производители делают ставку на сохранении обрезаемых функций и удобстве работы с их программным обеспечением.Программы для PIC-контроллеров весьма разнообразны, поэтому тут в значительной мере дело вкуса.

Создавать специальную программу можно с помощью соответствующего программного обеспечения и даже в простом блокноте. Такая возможность существует благодаря тому, что он работает с такими языками программирования, как ассемблер и С. Главное отличие заключается в количестве прописываемой информации и лёгкости задания данных. Можно много услышать о сложности С, но ассемблер ещё сложнее и требует более тщательного подхода.
Так, при создании программы необходимо указать, для какого контроллера она предназначается. Может понадобиться провести ряд настроек, но проводить их необходимо при наличии опыта работы или уверенности в своих силах, ведь ошибки могут привести к тому, что микроконтроллеры превратятся в обычные кусочки пластика и железа.

Но как перенести разработанную программу в сам микроконтроллер? Как происходит программирование микроконтроллеров? Специально для этой цели существуют специальные устройства - программаторы. Они посылают микроконтроллеру сигналы, которые изменяют ячейки в памяти в соответствии с программой. Для начала процесса перенесения данных необходимо вставить микроконтроллер в программатор, а его, в свою очередь, подключить к компьютеру. Затем с помощью программного обеспечения следует запустить прошивку. Обычно программирование PIC-контроллеров продолжается от тридцати секунд до двух минут.

Какой программатор выбрать для записи программы на микроконтроллер? Условно можно выделить три вида: самодельные, от компании-производителя и заводские от других компаний. Использование каждого из них имеет свои особенности.
Так, самодельные программаторы являются довольно дешевыми. Но их использование чревато тем, что они могут запросто превратить микроконтроллер в кусочек пластика и железа. И программирование микроконтроллеров может в таких случаях обратиться неприятными последствиями в виде удара током, поэтому следует придерживаться техники безопасности. К тому же если делать самому с нуля, то часто получится продукт с довольно ограниченными возможностями относительно смены объекта работы. Но в мировой сети можно найти значительное количество решений этой проблемы, предложенных другими людьми, и которые, вероятно, не доставят вам проблем.
Оригинальный программатор от компании-производителя сможет качественно выполнить свою работу для любого микроконтроллера. На него существует гарантия, и если после получения он не работает, то заменить не проблема. Но в порядке вещей, когда прошивка PIC-контроллеров им осуществляется без проблем.
Но останавливает от его приобретения довольно высокая цена.
Программаторы, выпущенные другими компаниями, имеют довольно широкий диапазон объектов, с которыми работают. Их особенностью является низкая цена и/или возможность работать с другими микроконтроллерами кроме PIC. Есть и поистине универсальные «монстры», которые могут обеспечивать работу различных типов, но из-за необходимости создания большого количества соединений их цена низкой не бывает.

И напоследок несколько слов о схемах изображений. Следует ориентироваться по ножкам на основании сопроводительной документации, так как схематически часто микроконтроллеры отличаются от реального построения выводов. Главным в таких случаях являются подписанные выводы, и именно по ним и следует ориентироваться при создании устройства.
Наконец-то сегодня нашлось время познакомить вас с ещё одним семейством микроконтроллеров — это микроконтроллеры PIC .
Данные микроконтроллеры также являются очень известными, устанавливаются во многие устройства и давно уже снискали у радиолюбителей очень сильный интерес.
Разработчиком данного семейства является компания Microchip , которая также ялвяется очень известной и её продукция востребована по всему миру.
Изучение данной серии контроллеров является очень нелёгким вопросом, я этим заниматься начал уже давно, но нормально разобрался с линейкой только сейчас. Последнее время я немного ускорил процесс изучения микроконтроллеров PIC благодаря вашим просьбам в группах и чатах, на которые я не мог не откликнуться.
Поэтому замечу, что программировать МК PIC мы будем именно на языке C. Какую мы выберем среду программирования и компилятор, мы решим чуть позже, а пока же в данном уроке нас ждёт краткое знакомство с самими контроллерами, с их архитектурой и их разновидностями.
Например, те контроллеры AVR, с которыми мы до сих пор работаем, являются 8-битными, а контроллеры STM, которые мы изучаем — 32-битными.
Вот и контроллеры PIC также делятся по битности.
Первая линейка — это 8-битные контроллеры PIC. Наименование их моделей начинается с префикса PIC10/PIC12/PIC16.
Данная линейка также делится на 3 семейства.
1. BASELINE — данная архитектура присутствует у контроллеров PIC10. От более мощной серии она отличается количеством выводов (от 6 до 28), дешевизной.
2. MID-RANGE — данную архитектуру имеют ядра микроконтроллеров PIC12/PIC16. Количество выводов в данной серии увеличено (от 6 до 64), стоят они несколько дороже, зато имеют помимо 35 машинных инструкций, поддерживаемых серией BASELINE, ещё 14 дополнительных инструкций (оптимизированных под компилятор языка C). Также у данной серии производительность увеличена на 50%, они имеют более глубокий и улучшенный аппаратный стек, увеличенный объём памяти и некоторые прочие прелести, с которыми мы познакомимся в дальнейшем, так как, скорее всего, мы с данной серии и начнём процесс изучения программирования микроконтроллеров PIC .
3. 8-битовые микроконтроллеры PIC18 — это улучшенная серия контроллеров, здесь на борту много другой периферии, количество выводов от 18 до 100, производительность 16 MIPS, поддержка технологии NanoWatt, наличие программироуемого генератора.
Вторая линейка — это 16-битные контроллеры PIC . Они имеют префикс PIC24F и PIC24H. Это уже более мощные контроллеры. В отличие от первой линейки, машинная команда выполняется уже не за 4 такта генератора, а за 2. Также периферия еще более расширена по разновидностям шин, прямой доступ к памяти DMA (у PIC24H), расширенный набор инструкций. Также есть очень много других особенностей.
Третья линейка — это 32-битные контроллеры. Префикс у них уже PIC32. Частота тактирования таких контроллеров до 120 МГц, а у новой серии MZ — до 200 и даже выше. У меня, например, есть отладочная плата, на которой устрановлен контроллер PIC32MZ2048EFH064, у которого тактовая частота составляет 252 мегагерца. Также здесь ещё более увеличена производительность ядра. Данное семейство построено на ядре MIPS32®, которое также кроме высокой производительности отличается ещё и низким потреблением энергии.
Вообщем, вот такие вот краткие характеристики существующих на данный момент контроллеров PIC. Если брать по наименованиям, то наименований очень много, на любой, как говорится, вкус.
Также, как и рассмотренные, а также рассматриваемые нами контроллеры AVR и STM32, контроллеры PIC работают приблизительно по той же схеме. Сочиняется программа, собирается в машинный код, понятный арифметическо-логическому устройству контроллера, загружается (прошивается или заливается) в контроллер и затем обеспечивает работу по определённому алгоритму. Основной интерфейс, используемый для прошивки данных контроллеров — это ICSP , предназначенный для внутрисхемного программирования. Подробнее с ним мы познакомимся, когда будем прошивать данные контроллеры.
Давайте немного разберёмся с организацией памяти в контроллерах PIC. Так как мы начнём изучение семейства PIC с более простых 8-битных (принцип от простого — к сложному ведь не отменял никто), то и организацию памяти мы посмотрим у данной серии.
Сначала посомтрим блок-схему контроллера на примере МК PIC16F84A (нажмите на картинку для увеличения изображения)
В левом верхнем углу сразу бросается в глаза модуль памяти FLASH, в которой обычно хранится программа контроллера (прошивка). А в правом верхнем углу мы видим память EEPROM, которая уже исользуется для хранения данных. Эти два вида памяти являются энергонезависимыми и после отклчения и сброса контроллера не стираются. Но данная память не является быстрой, поэтому код при старте программы распределяется уже в память RAM (ОЗУ), которая уже является быстродействующей и предназначена для функционирования контроллера при работе. Поэтому данную память мы уже рассмотрим несколько поподробнее.
Оперативная память контроллера PIC делится на память программ и память данных.
Вот так организована память программ у контроллера PIC16F84A
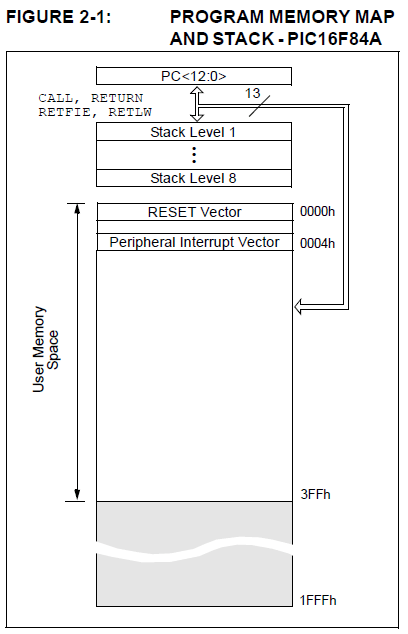
Микроконтроллеры данной серии имеют счётчик команд, способный адресовать 8К x 14 слов памяти программ и 14-разрядную шину данных памяти программ. Вся память программ разделена на 4 страницы по 2 килослов каждая (0000h-07FFh, 0800h-0FFFh, 1000h-17FFh, 1800h-1FFFh). Ну это общая информация, поэтому у тех контроллеров, у которых память небольшая перемещение между данными страницами приведёт к циклической адресации. Поэтому размер памяти того контроллера, который мы хотим программировать, мы обязаны знать твёрдо. В общем случае память программ состоит из счётчика команд, стека нескольких уровней, память для хранения векторов прерываний, а также внутренней памяти программ.
Также немного познакомимся с организации оперативной памяти, отведённой под хранение данных.
Память данных разделяется на регистры общего назначения и регистры специального назначения. Посмотрим, как организована память данных контроллера PIC16F84A

Регистры специального назначения (SFR) — это регистры, которые предназначены для хранения строго отведённых величин и имеют определённые имена. С ними мы будем знакомиться постепенно, когда будем писать какой-то исходный код, который будет широко их использовать.
Регистры общего назначения (GPR) — это ячейки памяти, которые имеют только адреса и предназначены они для хранения любых данных.
Также из приведённого выше рисунка мы видим, что у нашего контроллера память данных разделена на 2 страницы (или банка) переход между которыми осуществляется посредством установки определённых битов в регистре STATUS . Поэтому данный регистр присутствует в обеих банках и обратиться к нему мы можем в любой момент, чтобы сменить текущую страницу памяти.
Адресация может быть как прямая, так и косвенная или относительная, когда адрес отсчитывается относительно текущего адреса. С этим мы возможно не будем знакомиться, так как такая задача возникает у программистов, которые пишут программы на ассемблере.
Соответственно, у каждого контроллера кроме памяти существует много чего ещё интересного, в том числе порты ввода-вывода. Наши контроллеры PIC — также не исключение. Посмотрим назначение ножек контроллера PIC16F84A
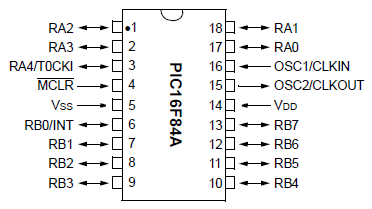
У данного контроллера два порта — порт A и порт B. Из порта A наружу выведены 5 ножек — RA0-RA4, а из порта B — все 8 ножек RB0-RB7.
Также ножки портов могут иметь и другое назначение в зависимости от того, как мы их сконфигурируем. Наример ножка 6 или RB0 может в любой момент превратиться в ножку для захвата внешних прерываний, а ножка 3 или RA4 — стать ножкой для тактирования таймера от внешнего генератора.
Тактирование МК PIC также может осуществляться как от внешнего генератора, так и от кварцевого резонатора, от внутреннего резистора, а также существует ещё несколько вариантов, которые поддерживают не все контроллеры данного семейства. На практике как правило используется тактирование от кварцевого резонатора. Скорее всего, мы также последуем данной традиции в наших дальнейших занятиях.
Думаю, на этом мы закончим знакомство с контроллерами PIC. Знакомство получилось кратким, но на первое время нам и этого хватит за глаза. С более расшифрованной информацией мы столкнёмся, когда будем сочинять наши программы. Так что ждите следующих занятий, которые обещают быть очень интересными. Мы познакомимся сначала с установкой среды и компилятора, изучим, как с ними работать, какие тонкости программирования присутствуют в настройках различной периферии, а также в работе с ней.
Смотреть ВИДЕОУРОК (нажмите на картинку)

Post Views: 9 304
Недавно решил собрать устройство на микроконтроллере фирмы PIC, но по не известным причинам у меня отказал программатор Extra-PIC . Скорее всего, сгорела микросхема МАХ232 , такое уже было один раз. Недолго думая, нашел в Интернете простенькую схему программатора, заточенного под IC-Prog и работающую через СОМ порт.
Далее просверлил отверстия и начал паять детали. Самой большой проблемой были стабилитроны. Стабилитроны стал искать на плате от ЭЛТ-монитора. Подписаны на плате они как ZD (Zener Diode). Естественно маркировка у них непонятная и неизвестно где и как искать. Чтобы определить, на сколько вольт стабилитрон можно собрать простую схемку.

Вольтметр достаточно точно покажет, на сколько вольт стабилитрон. Таким нехитрым способом нашел приблизительные по номиналу стабилитроны. Вместо 5,6В установил 6,2В, вместо 12,6В поставил 2 стабилитрона последовательно 6,2+6,2=12,4В
.

Транзистор можно поставить КТ315 . У себя поставил С945 . Диоды тоже любые, я выпаял все 3 шт. из диодного моста той-же платы от монитора. Номинал конденсаторов также не критичен, но их поставил по номиналу.
Немного про красные пятачкИ у панелек. Эти ноги вообще не паяются у панелек. Полностью готовый девайс выглядит так:

Панельки решил не все паять, т.к. мне нужно было прошить только PIC16F628А . После того как спаял нужно настроить программу. Прошивать мы будем IC-Prog. , распаковываем из архива, все файлы должны быть обязательно в одной папке!
1)
Если вы пользуетесь Windows NT, 2000 или XP, то правой кнопкой щёлкните на файле icprog.exe. "Свойства
" >> вкладка "Совместимость
" >> Установите "галочку" на "Запустить программу в режиме совместимости с:
" >>
выберите "Windows 2000".
2) Запускаем программу. Если она уже на русском - ничего не нужно, переходите к шагу 3 .
Если программа на английском, то жмите "Settings
" >> "Options
" >> вкладку "Language
" >> установите язык "Russian
" и нажмите "Ok".
Согласитесь с утверждением "You need to restart IC-Prog now
" (нажмите "Ok
"). Оболочка программатора перезапустится.
3)
Теперь нужно настроить программатор. Кликайте "Настройки
" >> "Программатор
". Проверьте установки, выберите используемый вами COM-порт, нажмите "Ok
".

Для очень "быстрых" компьютеров возможно потребуется увеличить параметр "Задержка Ввода/Вывода". Увеличение этого параметра увеличивает надёжность программирования, однако, увеличивается и время, затрачиваемое на программирование микросхемы.
4) Только для пользователей Windows NT, 2000 или XP. Нажмите "Настройки " >> "Опции " >> выберите вкладку "Общие " >> установите "галочку" на пункте "Вкл. NT/2000/XP драйвер " >> Нажмите "Ok " >> если драйвер до этого не был устновлен на вашей системе, в появившемся окне "Confirm " нажмите "Ok" . Драйвер установится, и оболочка программатора перезапустится.
5) Нажмите снова "Настройки " >> "Опции " >> выберите вкладку "I2C " >> установите "галочки" на пунктах: "Включить MCLR как VCC " и "Включить запись блоками ". Нажмите "Ok ".
6)
"Настройки
" >> "Опции
" >> выберите вкладку "Программирование
" >> снимите "галочку" с пункта: "Проверка после программирования
" и установите "галочку" на пункте "Проверка при программировании
". Нажмите "Ok
".

Готово, теперь программа полностью готова к работе с программатором. Подключаем наш программатор к СОМ порту, выбираем наш микроконтроллер в программе, открываем прошивку и программируем любые МК серии PIC. Удачи всем в работе с программатором и контроллерами!
Обсудить статью ПРОГРАММИРОВАНИЕ PIC КОНТРОЛЛЕРОВ